-

脑机接口新「胶水」问世,人机融合「半机器人」新突破
听过「半兽人」、「半鱼人」,可你听过「半机器人」吗? 尽管半人半机器的「半机器人」目前只存在于电影中,但近年来,很多脑机研究都在向着电子与身体融合的方向发展,而且取得了不小的进步。 放心,科学家设计这些「半机器人」们不是为了让他们满地跑的。将电子设备与人体相连,可以更好地监视肿瘤或替换受损的组织、实现脑机通信等。 但是,这是一个巨大的挑战。因为传统的微电子材料,例如硅,金,不锈钢和铱,在植入人体时会造成创伤,留下疤痕。对于肌肉或大脑组织中的应用,需要传递电信号以使其正常运行,但是疤痕会影响电信号…
-
《Nature》封面:化学家失业在即?不需要休息!无情的科研机器人横空出世!
日本现代机器人之父大阪大学教授石黑浩曾经表示,“人类的进化有两种方式,一种是基因进化,还有一种是技术进化。而在他看来,技术层面的进化比基因层面的进化要快很多。” 而他说提到的技术层面,就是指未来机器人会代替人类的躯干,帮助人类进行行动。 虽然我们曾在电影中或睡梦里无数次看到过这种场景,但是,当人工智能机器人真的发展到这个地步,我们不免感叹,未来自己还能做什么?近日,来自利物浦大学的研究人员,成功的开发了一款人工智能机器人化学家。 这款机器人化学家具有人形特征,可以在标准实验室中自己工作,像人类一…
-
人造皮肤突破性进展!顺应性传感器助力假肢或机器人具有真人感觉
在人类皮肤内的缓慢适应(SA)受体中,SA-I(Merkel cell)和SA-II(Ruffini organ)在顺应性感觉中起关键作用。前者以高分辨率测量施加在皮肤上的静压,而后者则能够检测皮肤的伸展。随着可拉伸材料和微细加工技术的发展,报道了能够检测温度以及静态和动态力的柔性传感器。由于顺应性传感器是一种重要的感测块,因此需要对其进行开发并将其集成到人造皮肤上,以为假肢或机器人系统提供类似人的感觉。然而,已有的四种传感机制(转换为数字读取的电信号)的传感器外部组件(精密光学测量组件等)体积…
-
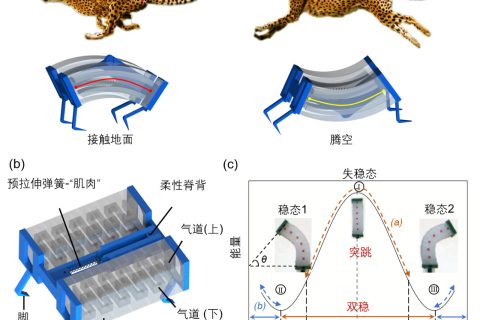
仿猎豹迄今速度最快软体机器人
软机器人通常由比人体肌肉还要柔软的软材料制造而成 ,通过控制其柔软身体的变形来模仿自然界中各种软体动物的运动,比如毛毛虫,蛇、鱼以及水母等。和刚性机器人相比,软机器人在柔性、灵活性、以及安全性等方面都具有优势。但是同时,柔性材料也带来了一些天然缺陷,比如响应慢及力量小等,因此大多数软机器人运动速度较为缓慢,介于每秒0.02至0.8个身长(自身身体长度)。自然界中蜗牛的爬行速度为每秒0.1-0.2个身长,而猎豹的速度为每秒16个身长。如何让软机器人也能高速跑起来成为了一个亟待解决的问题。 近日,北…
-
集运动、感知功能为一体的光驱动薄膜机器人
近年来,对有机生命体复杂的响应、运动机制的探索促进了软体机器人的研究和发展。相比于传统的硬机器人,由柔性材料、软物质材料组成的软体机器人展现出了连续的身体变形以及复杂的运动模式,同时也为人机交互提供了多样化的、安全的操作界面。然而,目前的研究主要集中在驱动变形、运动模式的操控,所开发的机器人只有有限的或者没有对自身和环境的感知能力,这阻碍了其进一步面向精细人工智能机器人的发展。要赋予小尺寸软体机器人以知觉,其中最大的挑战在于实现一个高度集成的传感、驱动机制。 基于以上研究背景,新加坡国立大学的G…