

瓢虫翅膀通过精妙的节肢弹性蛋白和翅脉布置使柔软的薄膜翅膀同时具有能量存储和自锁的功能。前者使翅膀可以在100毫秒内迅速展开,后者可以让翅膀在飞行过程中承受巨大的气动力。在不使用时,这种薄膜翅膀还可以紧密折叠回收至甲壳之下。
PNAS, 2017, 114(22).
相比于令人惊叹的自然构造,传统的机械结构至今仍无法有机地结合上述特性。可收缩管状外伸构件(Storable tubular extendible member, STEM)尽管具有良好的能量存储和自锁特性,然而却较难平整地折叠储存;折纸结构(origami)尽管提供了紧凑且轻巧的结构设计,然而缺乏能量存储和自锁能力。加装额外的辅助性构件虽然可以解决这一问题,但是需要牺牲origami的紧凑性。
造成origami上述问题的根源就在于传统的origami结构设计中将结构基元视为高硬度材料,它们通过低硬度的柔软关节连接在一起从而实现折叠。然而柔软关节和高硬度基元在折叠和伸展均不具备储能和自锁的特性。

近日,韩国首尔国立大学(Seoul National University,SNU)的Kyu-Jin Cho教授研究团队受瓢虫翅膀启发,设计了一种以聚对苯二甲酸乙二醇酯(Polyethylene terephthalate,PET)弯曲薄片为结构基元,抗撕裂面料为柔性连接的柔性origami结构。弯曲的PET基元同时提供了储能和自锁性能,并且被折叠平整的PET基元可在116毫秒内完全展开,展开后的origami结构可承受150倍于自身重量的荷载。这一设计策略有效解决了origami结构不储能、不自锁的固有问题,为可伸缩滑翔翼和origami弹跳机器人等应用提供了更广阔的设计空间。该工作以“Ladybird beetle-inspired compliant origami”为题发表在Science Robotics上。韩国首尔国立大学的Kyu-Jin Cho教授为唯一通讯作者。
来看下这个瓢虫机器人有多酷:
瓢虫机器人被人从高空释放,自行展开翅膀,飞行,落地后自行折叠翅膀,爬行
遇到跳台,打开翅膀飞行

瓢虫启发的柔性origami结构

瓢虫启发的柔性origami结构及其灵感来源如图1所示,其具体的制备流程如下:
1)通过激光切割在两片PET薄片上切割定位针孔,并在涂有热敏胶的一边切割出折叠线;
2)在抗撕裂面料上用激光切割出定位针孔;
3)叠放PET薄片和抗撕裂面料;
4)将叠放好的origami结构放入模具中;
5)加热加压模具至110 oC,1 MPa并保持5分钟;
6)冷却至室温并取出;
7)裁剪结构轮廓。所得柔性origami结构有正向和反向折叠两种模式,其折叠力矩的峰值具有非对称性,两个峰值之间即为柔性origami结构的自锁区域,其自伸展所需能量来源于折叠过程中柔性基元展平时储存的弹性势能。
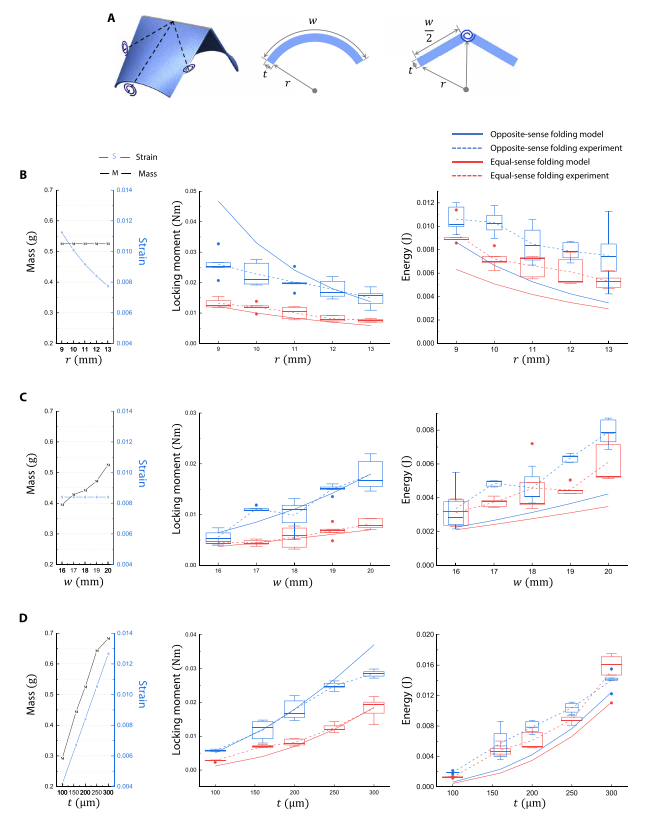
柔性origami结构的设计参数包括薄片宽度(w)、厚度(t)和弯曲半径(r)。在设计origami结构时,主要关心的性能包括结构质量(mass)、最大形变(strain)、自锁力矩(locking moment)和能量存储(energy)。各个设计参数对结构性能的影响如图2所示。为满足设计要求,可先优化厚度,再基于质量和最大形变的要求对薄片宽度和弯曲半径进行调整。
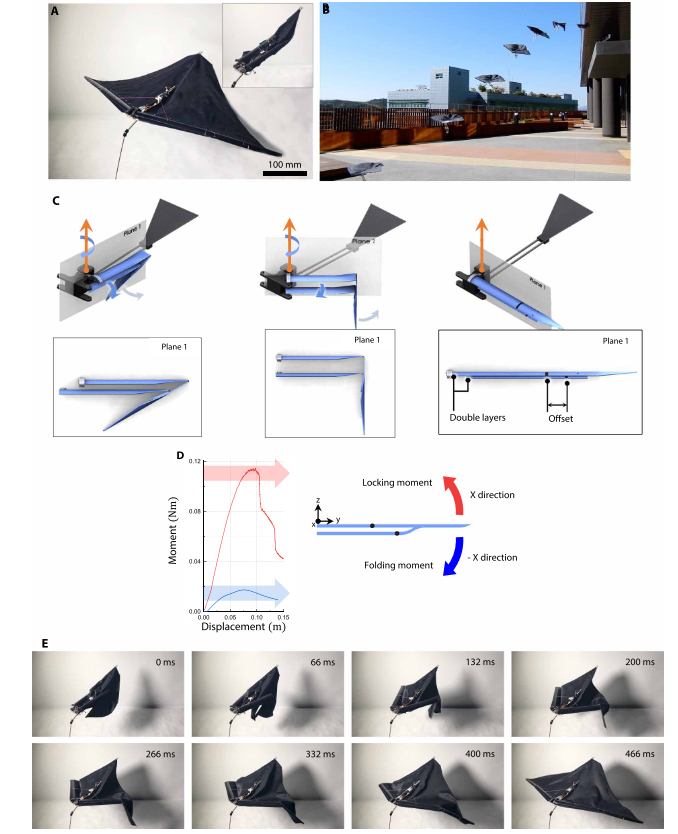
通过叠放两片柔性origami结构,并调整其长度和相对位置,可将origami结构的正向和反向折叠力矩差异扩大至6倍,从而实现正向易折叠,反向承受气动力的特性。基于上述原理并采用单轴旋转关节固定柔性origami结构,可以制备可高度折叠(折叠后尺寸仅为原来的1/8)、多运动模式、自伸展、轻量化的滑翔翼。此类滑翔翼不再需要辅助构件帮助伸展或锁定机翼,因而有效减轻了重量和结构复杂度,提高了飞行时的能量利用效率和可靠性。
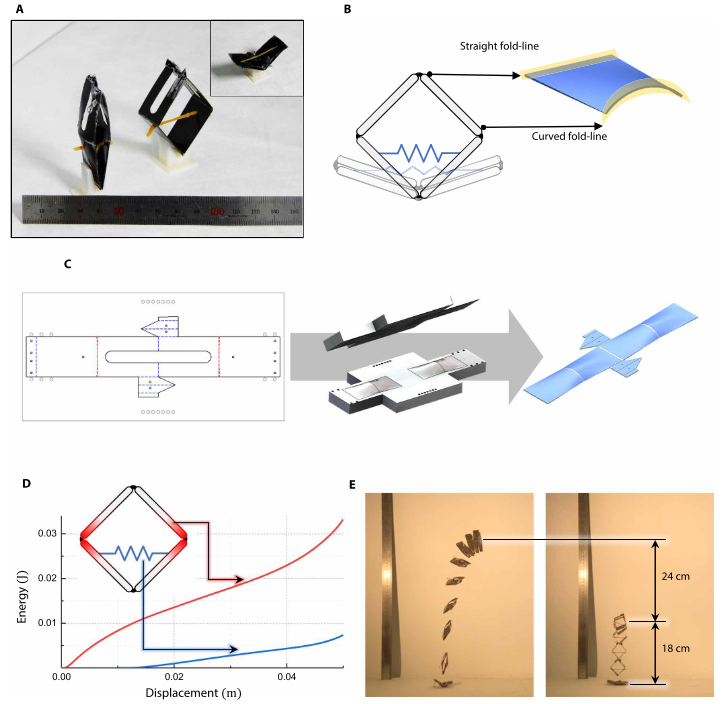
传统的跳蚤机器人的连接关节不具有储能的特性,因而在弹跳时,弯曲的关节并不能为跳跃提供能量支持。将构成跳蚤机器人的结构单元替换成柔性origami结构后,折叠成薄片的origami结构不仅仅将能量存储于橡胶绳中,其结构基元也同时储存了能量,因而跳跃高度比传统的跳蚤机器人高出了50%。

总结
本文提供了一种全新的origami结构设计思路,并探讨了相关的力学原理和应用场景。通过改变柔性origami基元的形状,可以让origami结构同时具有储能和自锁的特性,进而降低对辅助结构的依赖性。然而本文仅探讨了一种弯曲结构,其它可能的储能结构仍有待进一步探索。此外,在应用过程中,如何实现能量的动态存储和释放以及结构形态的动态控制仍然是有待解决的问题。
原文链接
